




基于磁耦合谐振的智能无人设备充电系统
【研究目的】
随着物联网、无线通信与无人机等在生产和生活中的广泛应用,其能源保障问题愈发突出。从“无人机返回机库充电”转变为“AGV主动充电”,关注无人机的续航时间与应用性能,已成为了未来趋势,而其技术的关键为无线能量传输与移动充电调度。本成果的研究目的为研发一套基于磁耦合谐振式无线能量传输的移动充电系统,利用AGV移动实现对无人机高效率、低误差、低延迟的无线充电,为延长无人机的续航时间与提高应用性能提供有效的技术手段。
【技术创新】
针对传统智能无人设备充电方法所存在的隔空能量传输距离短、能量传输效率低与应用场景受限等问题,研发了基于磁耦合谐振式无线能量传输的移动充电系统,利用AGV自主移动为目标无人机进行充电,提升了能量传输距离与效率,大大延长了无人机续航时间。主要技术创新点包括:
(1)开发了基于磁耦合感应的无线充电技术,提高能量传输效率至70%;
(2)优化谐振补偿网络及耦合结构,实现了无线充电在偏移不大于8cm或偏转角度不大于30°的情况下输出效率不低于60%。
(3)设计了基于Apriltag标识物识别的无人机自主着陆技术,着陆定位误差小于15cm;
(4)提出了基于强化学习的移动充电调度策略,使AGV基于观测信息自主选择目标无人机并完成轨迹规划;
(5)设计了一种AGV与多无人机的自主充电方案,同步提升多无人机续航能力。
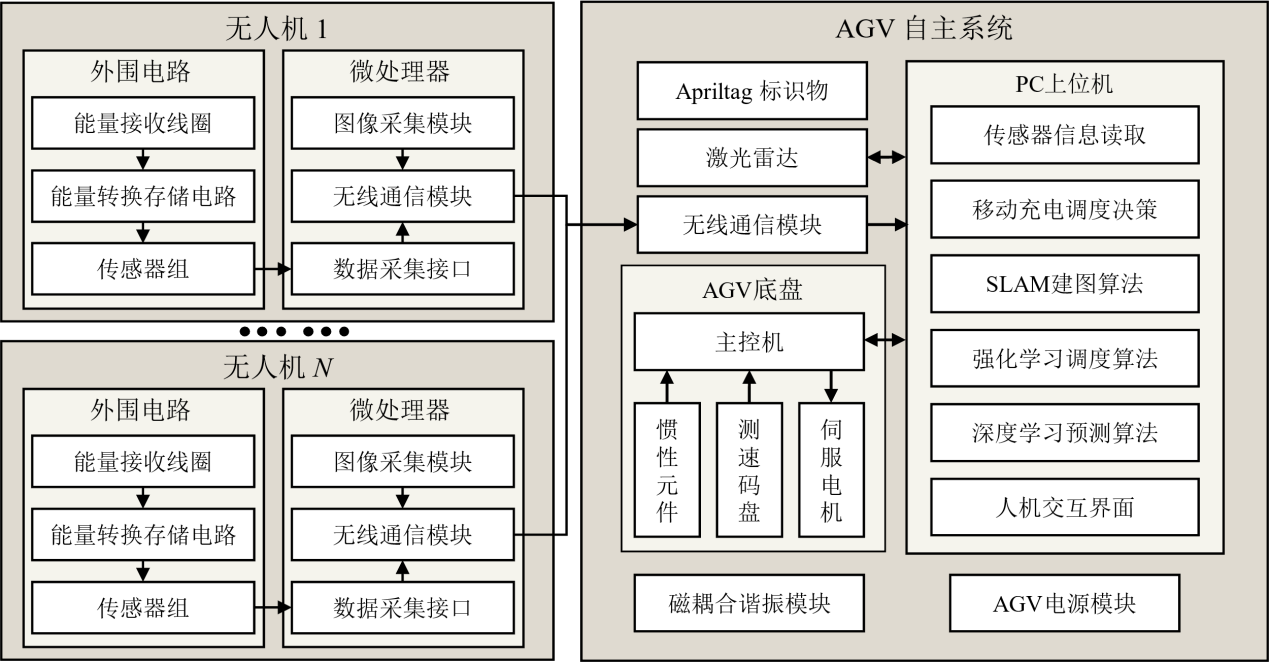
基于磁耦合谐振式能量传输的移动充电系统技术方案
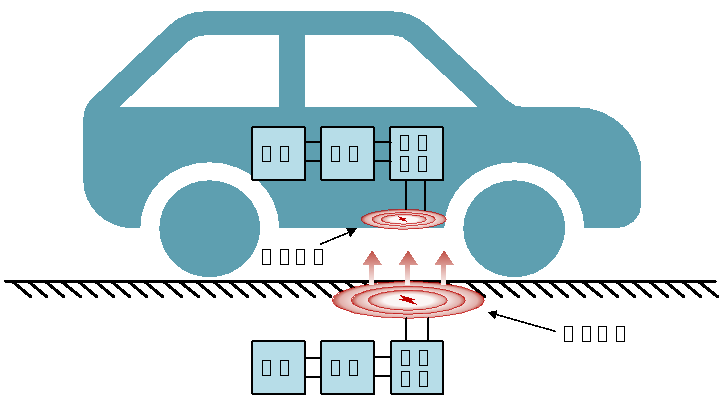
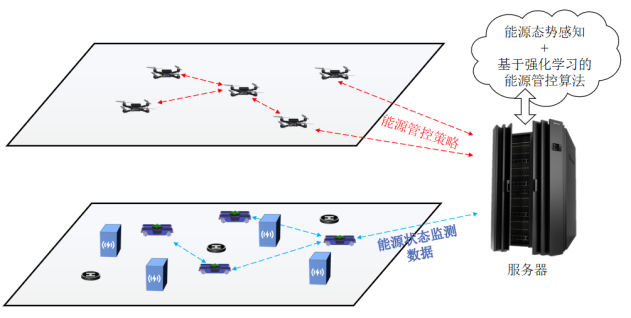
磁耦合谐振无线充电技术示意图多无人机与多AGV协同能源管控平台
【知识产权】
(1)发表相关研究论文22篇,专著1部;
(2)完成发明专利2项。
【应用行业领域】
工业生产、无人机、移动机器人、电动汽车、电力巡检等。
【成果应用情况】
(1)2023-2024年,与军事科学院局势新能源研究所合作开展无人车能源保障课题;
(2)2023-2024年,与北京优拓鸿智能技术有限公司合作开展重点结构移动健康监测技术与产品研发。

