




移动机器人工业园区安全视觉感知
【研究目的】
在工业场景中,常使用大型机械装备进行操作,因其涉及到大型机械设备和现场人员间的复杂交互,是一项具有安全风险的作业任务。传统的施工安全检测方法主要依赖于人工巡检,存在着工作效率低、风险高、主观因素干扰等问题。因此,利用人工智能技术保证生产安全具有一定的研究价值。复杂环境下的安全检测是许多领域的重要需求,如智能监控、机器人巡检等。在这些场景中,对环境的准确感知和理解是至关重要的,而移动机器人工业园区安全视觉感知能够提供这种感知和理解。
【技术创新】
随着机器人和计算机视觉广泛应用,如何将两者结合应用于工业安全预警,增强企业安全管理能力,已成为工业智能化监控的重要挑战。本项目围绕工业安全事件分析与监测预警无人化的需求,定制了企业园区场景地面和空中飞行相结合的巡检机器人,可以实现施工作业无人化安全规程监控、弹窗图像记录和安全告警。主要创新点如下:
(1)创建了工业园区全场景安全事件图像数据集,样本多达5000张图片,为深度学习训练提供强大的数据支撑;
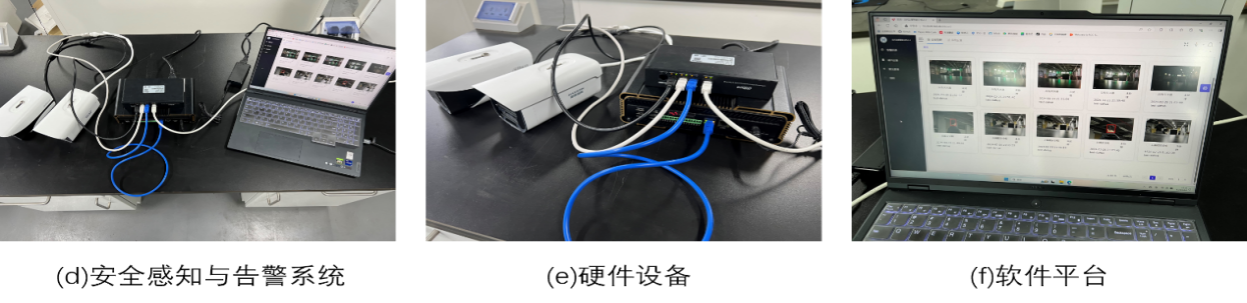
(2)设计了RKNN边缘计算盒的硬件框架,包括RK3399的NPU芯片的视频监控和无线通信系统,实现实时的目标识别和快速的数据传输;
(3)提出了一种移动视角快速算法MP-YOLO(Moving Perspective YOLO),融合了时空上下多帧关联识别以及带有先验知识的模板匹配算法,增强了人-车-物多尺度目标的快速检测能力;
(4)制定了安全规则触发告警的流程,实现了实时违规操作图像记录,及图像弹窗告警。

【知识产权】
(1)发表相关研究论文 1 篇;
(2)申请中国发明专利 1 项。
【应用领域】
人工智能、机器人、安全应急等。
【应用情况】
2023-2024年,与北京某建筑公司合作开展横向合作和专利技术转让,累计金额40万元。

