




蛇形机器人及其控制
【研究目的】
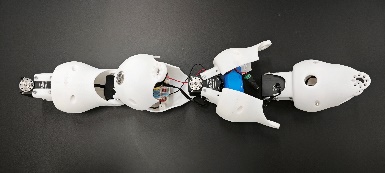
蛇形机器人是一种新型的无附肢的仿生机器人,具有极好的环境适应性和运动灵活性,能够在各种复杂的环境中执行作业任务。蛇形机器人身体结构狭长并具有极高的自由度,机器人本体的设计和实现都面临着巨大的挑战。此外,蛇形机器人基于环境相互作用的接触式运动机制使其对接触特性异常敏感,在复杂非结构化环境中的运动状态具有极大的不确定性。因此,蛇形机器人的设计与实现及其运动控制是蛇形机器人实现工程应用的关键基础。
【技术创新】
对蛇形机器人接触敏感性、高冗余自由度、低负荷、高功耗等问题,发明了不同系列的蛇形机器人,开发了蛇形机器人控制系统和供电系统,实现了蛇形机器人超越极限的作业能力。主要创新点如下:
(1)发明了多种结构的蛇形机器人,具有模块化、可重构的优点,可实现二维和三维运动能力;
(2)发明了蛇形机器人的分布式供电结构,使蛇形机器人的续航能力成倍提升;
(3)开发了结构、控制、感知、驱动一体化的蛇形机器人系统,实现了蛇形机器人的运动控制和仿真模拟;
(4)发明了蛇形机器人的多模态运动控制技术,实现了蛇形机器人灵活多样的运动形式及其不同运动形式间的平滑切换。
|
|
|
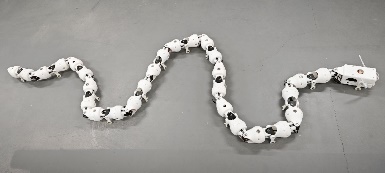
蛇形机器人 |
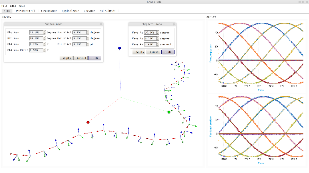
蛇形机器人操控面板 |
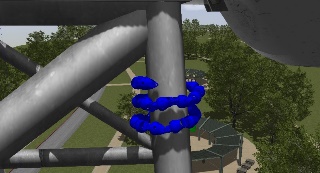
管道检查 |
|
|
|
分布式供电结构 |
信息感知 |
废墟搜索 |

【知识产权】
(1)发表相关研究论文 2 篇;
(2)授权中国发明专利 5 项。
【应用领域】
机器人、人工智能、航天军工等。
【应用情况】
实验室开发阶段。

