




基于激光六自由度测量的机器人在线校准技术
【研究目的】
旨在提高工业机器人的绝对定位精度,尤其注重姿态精度,以满足智能制造对工业机器人精度的更高要求。通过研究工业机器人末端位姿六自由度测量方法,分析误差来源并建立误差模型,以识别运动学参数偏差,并校准机器人的运动学模型。最终目标是开发出一套完整的工业机器人末端位姿测量与校准系统,以提升其位置和姿态精度。这将间接拓展工业机器人的应用领域,延长其使用寿命,并为我国经济社会发展带来积极推动。
【技术创新】
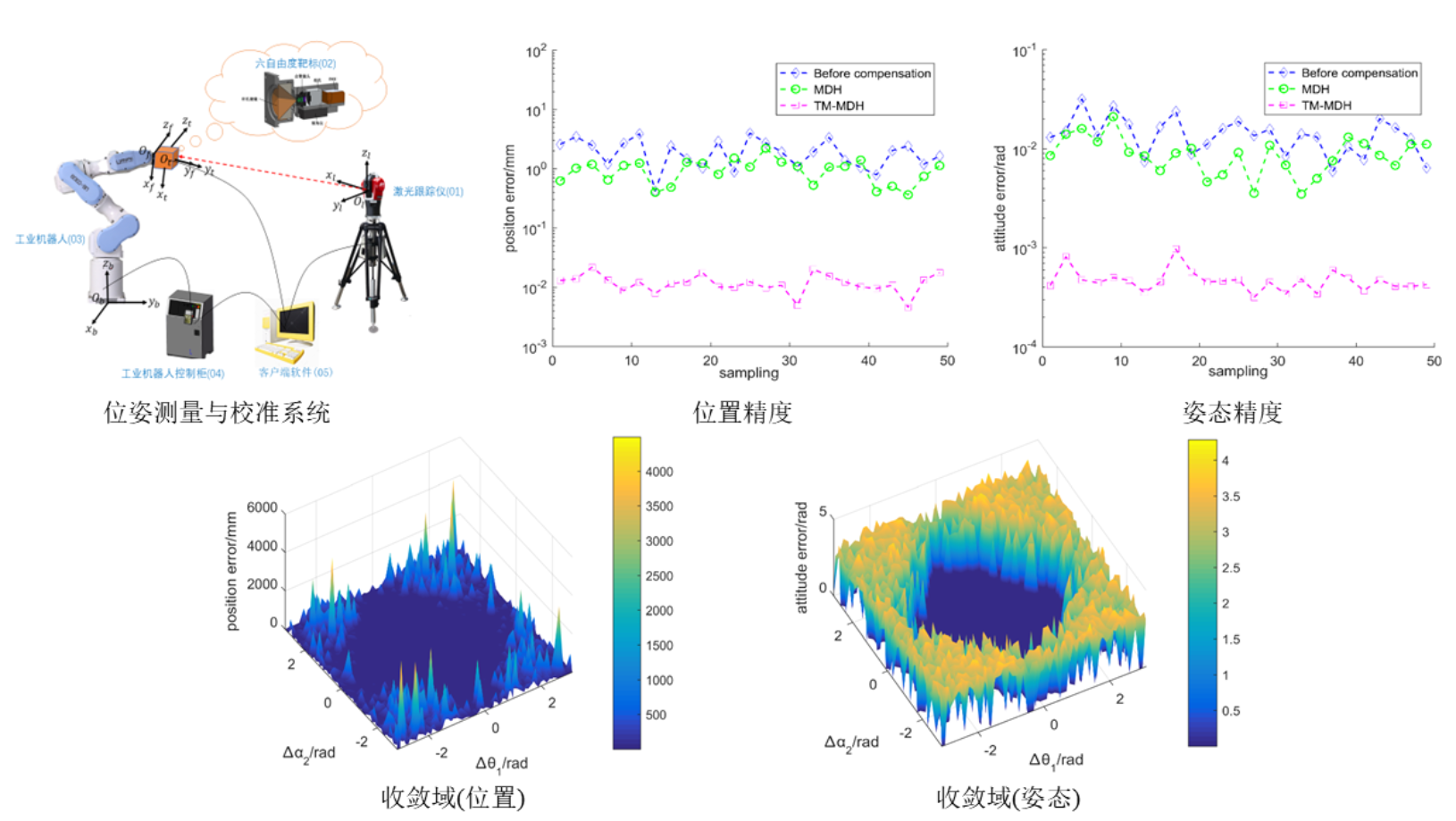
针对当前工业机器人绝对定位精度较低问题,提出了基于全站仪和激光靶标的六自由度测量系统、TM-MDH几何参数误差模型以及基于Levenberg Marquardt算法的交叉辨识方法,实现了运动学层级上的工业机器人末端位姿精度校准。主要创新点如下:
(1)提出了基于全站仪和激光靶标的六自由度测量系统,可准确实现工业机器人末端位姿测量,位置精度约为0.3mm,姿态精度约为0.01°;
(2)提出了TM-MDH几何参数误差模型,该模型考虑了工具和测量坐标系的标定误差。仿真表明,经TM-MDH模型校准之后,工业机器人末端位置误差由1.9536mm下降到0.0122mm,姿态误差由1.46E-02rad下降到1.31E-04rad;
(3)提出了基于Levenberg Marquardt算法的交叉辨识方法,解决了参数辨识过程中易陷入局部最优的问题,收敛域由原先的22.45%提到了53.16%。
【知识产权】
(1)发表相关研究论文5 篇,出版专著1部;
(2)授权中国发明专利 2项。
【应用领域】
智能制造、机器人、自动化技术等。
【应用情况】
(1)2021-2023年,与天津某科技公司合作开展横向合作和专利技术转让;
(2)2022-2023年,与上海某公司开展横向合作,仪器开发应用;
(3)2022-2023年,与北京某仪器公司合作开展横向合作仪器开发。

