




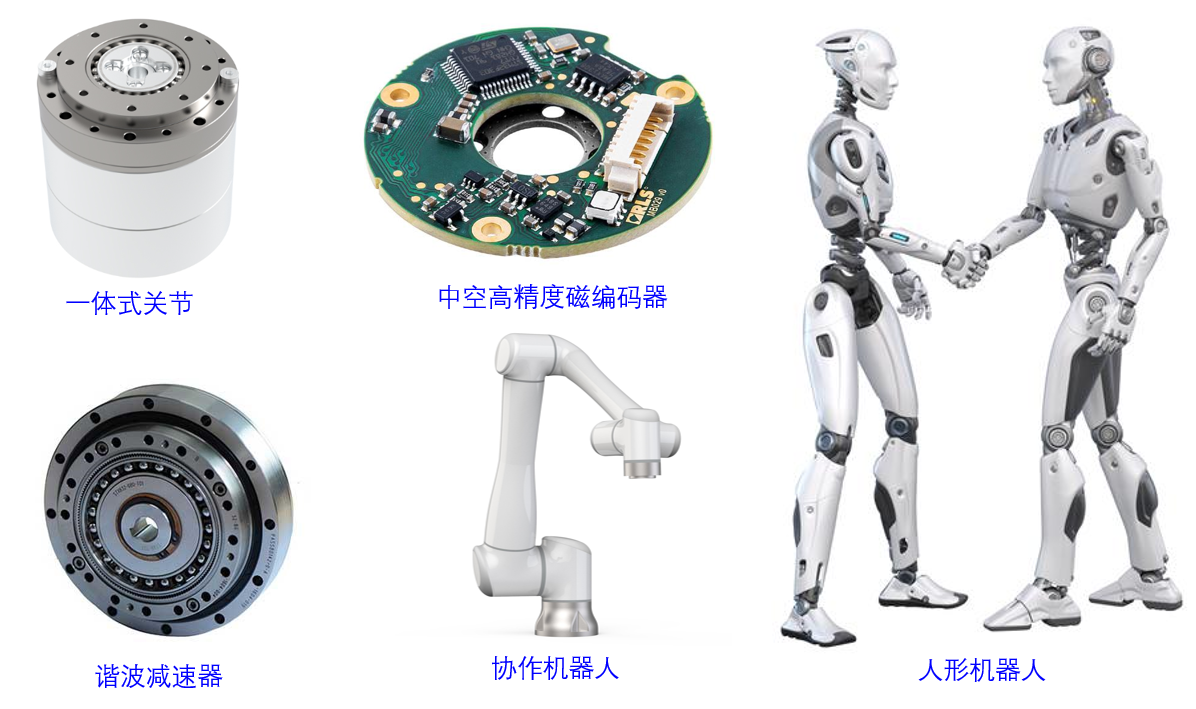
人形及协作机器人一体式关节
【研究目的】
协作式机器人关节臂由6个2-3种规格的一体式关节组成,人形机器人的核心关节也是一体式关节,一体式关节高度集成永磁同步电机、电机驱控器、绝对式编码器、谐波减速器、失电制动器于一体,为中空关节模组,模组具有高集成度、高精度、高性能、高性价比、低重量等特性,可直接应用在人形机器人、非标机器人、协作机器人、云台、转台中。
【技术创新】
针对人形机器人、协作机器人结构紧凑、尽量轻量化,以及各种线路不能暴露在外等需求,一体式关节将永磁同步电机、电机驱控器、绝对式编码器、谐波减速器、失电制动器集成于一体,各种导线部署在关节内部,采用标准485或CAN总线进行通信控制,进一步简化了集成难度。主要创新点如下:
(1)轻量化:使机器人更易于控制,提高安全性;
(2)部署灵活:结构连接及通信控制简单、容易集成;
(3)使用成本低:基本不需要维护保养的成本投入,功耗较低。
【知识产权】
(1)发表相关研究论文5篇;
(2)软件著作权 2 项。
【应用领域】
制造、汽车、安防、物流、服务等。
【应用情况】
(1)2022-2023年,应用在家用电梯曳引系统中,与企业开展横向合作;
(2)2023-2024年,应用在食堂餐桌垃圾清扫机器人中,与企业开展横向合作。

